Les mers et océans regorgent de trésors archéologiques dont la simple évocation réveille l’âme de l’explorateur qui sommeille en chacun de nous. Comment les découvrir ? On peut évidemment s’équiper de masques et bouteilles, mais le milieu hostile que représente la mer rend les plongées souvent difficiles et parfois dangereuses. Une autre solution est d’utiliser des capteurs et navires ou robots spécifiques dont les objectifs sont de décrire et représenter le fond marin en trois dimensions. Ce sont les thèmes de recherche des ingénieurs et chercheurs d’ENSTA Bretagne, sur le terrain et dans leurs laboratoires.
Pour illustrer ces recherches, voici l’étude d’une épave immergée en rade de Brest : le Cobetas, cargo espagnol à vapeur ayant sombré le 2 novembre 1918 suite à une collision avec un navire anglais. L’épave est aujourd’hui immergée à 20 mètres de profondeur dans un secteur de courants forts et de tourbillons (le Goulet de Brest) ce qui la rend difficile d’accès par plongée.
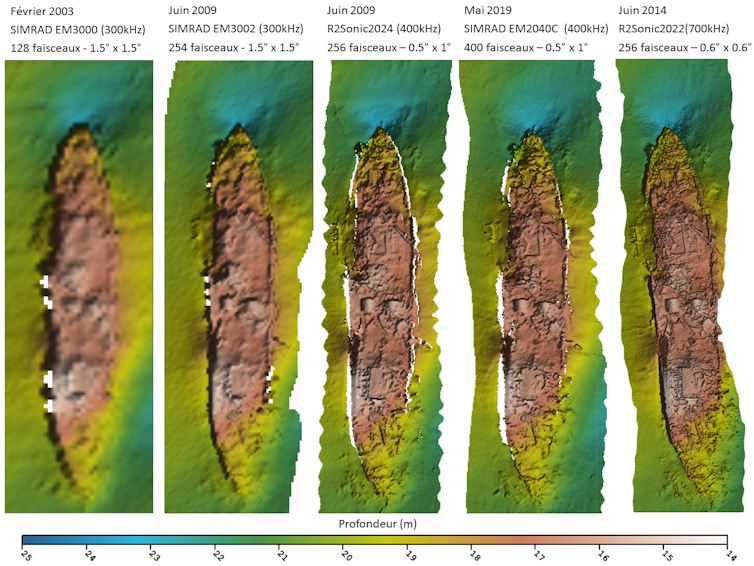
Cependant, la proximité géographique de l’épave avec le laboratoire de recherche d’ENSTA Bretagne en a fait une zone d’étude privilégiée. Les chercheurs peuvent suivre son évolution dans le temps en faisant régulièrement des mesures de la bathymétrie, c’est-à-dire de la topographie des fonds marins sur le Cobetas. En plus de la surveillance de l’épave, les données des différents capteurs analysées au cours des années traduisent les avancées technologiques en matière de résolution et de précision de la bathymétrie de la zone, mais aussi d’automatisation de leur traitement et de leur analyse.
Echographie des fonds marins
Pour créer un modèle numérique 3D du fond marin, plusieurs types de porteurs et de capteurs peuvent être utilisés (satellite avec altimètre, avion avec LIDAR, etc.). Dans le cas du Cobetas, la hauteur d’eau au-dessus de l’épave est faible, et l’eau de la rade de Brest est très turbide (embouchure des rivières Elorn et Aulne). Or la résolution du modèle doit être très élevée pour pouvoir décrire au mieux les restes du navire (chaudière, mâts, etc.).

Si l’on tient compte de ces contraintes, le meilleur capteur permettant d’acquérir des données bathymétriques sur le Cobetas est un dispositif acoustique nommé « sondeur multifaisceau ». Ce capteur est fixé, soit sous la coque d’un navire de recherche hydrographique, soit sur un véhicule sous-marin autonome. Il permet d’effectuer le levé bathymétrique à la manière d’une échographie : la hauteur d’eau en une position donnée est détectée en mesurant le temps que met une impulsion acoustique (son très bref) pour faire l’aller-retour entre le sondeur et le fond. Ces hauteurs mesurées sont appelées « sondes », en référence aux mesures de hauteur d’eau qui étaient faites grâce à des plombs de sonde au XVIIIe siècle à partir des navires hydrographiques.
Ebauche numérique de l’épave du Cobetas
On dispose donc à l’issue d’un levé bathymétrique d’un lot de sondes, chacune représentant une mesure de la hauteur d’eau associée à une position géographique. Le traitement, tout comme le stockage de ces données, s’appuie sur des représentations de la surface des reliefs marins. La continuité du fond est recréée artificiellement en faisant appel à des techniques d’interpolation qui aboutissent, en hydrographie, à des modèles numériques de terrain (MNT) réalisant un maillage régulier du fond. La profondeur en chaque nœud du maillage est estimée à partir des mesures bathymétriques faites en mer.
De nombreux domaines utilisent ces techniques de reconstruction, il existe donc pléthores d’algorithmes d’interpolation. Pour autant, la recherche de techniques innovantes reste toujours d’actualité : il s’agit de mieux intégrer les caractéristiques physiques des données et de répondre plus pertinemment aux besoins des chercheurs.
Nathalie Debese/ENSTA Bretagne
Le lot de données ainsi obtenu fait l’objet d’une validation. Il s’agit de détecter et d’invalider les mesures aberrantes. Elles peuvent être dues à des dysfonctionnements des capteurs, ou à des interférences dans la colonne d’eau (bulles d’air, poissons, etc.). Bien que le taux d’erreurs de ce type soit très faible, cette étape est cruciale, car la qualité des produits numériques qui découleront en dépendra directement. Dans le cas d’une épave, il s’agit de s’assurer que le point haut a été préservé lors du traitement, car il peut représenter un danger potentiel pour la navigation.
Compte tenu du volume de données toujours croissant que permettent d’acquérir les sondeurs multifaisceau, surtout par très petits fonds, cette étape de validation fait l’objet de nombreuses recherches. Les objectifs visés sont de réduire les temps de traitement, d’utiliser des critères objectifs de validation, et de garantir la traçabilité du processus. À cette fin, les chercheurs d’ENSTA Bretagne ont développé un algorithme de validation automatique des données bathymétriques. Les sondes aberrantes sont détectées automatiquement en modélisant localement les reliefs par des surfaces mathématiques particulières (surface polynomiale sur des quadtrees). Le critère de construction du modèle global du fond marin prend en compte les caractéristiques des données (dispersion des mesures liée à l’acquisition) et l’objectif des traitements (identification des objets présents sur le fond). On dispose à l’issue de cette étape d’un lot de sondes validées, d’un MNT construit à partir des sondes valides ainsi que d’une carte de confiance présentant la synthèse des traitements réalisés par l’algorithme.
Distinguer l’épave sur le fond marin et y retrouver des objets
À première vue, un MNT représente uniquement la profondeur d’une zone marine. Mais, si l’on y regarde de plus près, l’information contenue dans un MNT est bien plus riche de sens. En extraire les structures pertinentes pour les analyser en décrivant leurs propriétés métriques, géométriques et topologiques est un domaine de recherche très actif. La diversité des approches proposées s’explique là encore par la spécificité des données et les objectifs visés. Dans le cas du Cobetas, l’approche par surfaces de tendance ou surfaces osculatoires permet de séparer automatiquement le fond de l’épave puis d’extraire les objets encore présents sur le pont de l’épave.
Pour aller plus loin…
Une autre campagne d’exploration et d’archéologie sous-marine va reprendre cet été en rade de Brest, pilotée par le DRASSM avec l’appui des ingénieurs et chercheurs de l’ENSTA Bretagne et des technologies les plus innovantes. Cette fois l’enjeu est de retrouver une épave, celle de La Cordelière, coulée le 10 août 1512 dans le vaste espace maritime au large de Brest. Chaque indice compte !
Ces campagnes d’exploration et beaucoup d’autres feront l’objet de présentations de l’équipe de recherche ENSTA Bretagne (hydrographes, acousticiens, roboticiens) à l’exposition « La Mer XXL » du 29/06 au 10/07 au parc des expositions de Nantes.








